热烈祝贺我组张书铭、牟方志等联合哈工大李天龙教授撰写的论文“Heterogeneous Sensor-Carrier Microswarms for Collaborative Precise Drug Delivery toward Unknown Targets with Localized Acidosis”被期刊Nano Letters(2022年IF:10.8,中科院1区期刊)接收!
微纳米机器人可在难以到达的生物环境中执行各种任务,有望为生物医学领域带来变革性技术。然而,利用微纳米机器人集群将药物精准递送到未知疾病部位仍然是一个重大挑战。在此我们开发了一种包含传感微米机器人(s-bots)和载药微米机器人(c-bots)的异质集群,发展了其针对未知目标的协同精准药物递送方法。在异构个体间的强流体动力相互作用下,s-bots和c-bots能够自发地同步并自组织成稳定的异质集群。考虑到s-bots可以利用pH响应结构色变化进行实时pH测绘,而负载阿霉素的c-bots则通过pH响应电荷反转表现出对酸性靶标的选择性粘附,当探索未知环境时,传感-载药异质集群能够检测和定位未知的酸性靶标,引导自身覆盖该区域,并最终在靶标部位精准部署治疗性c-bots。这种多功能平台有望用于治疗具有局部酸性微环境的各种疾病,并为具有可扩展性、任务灵活性和高效性的疾病治疗微系统的发展提供新方向。
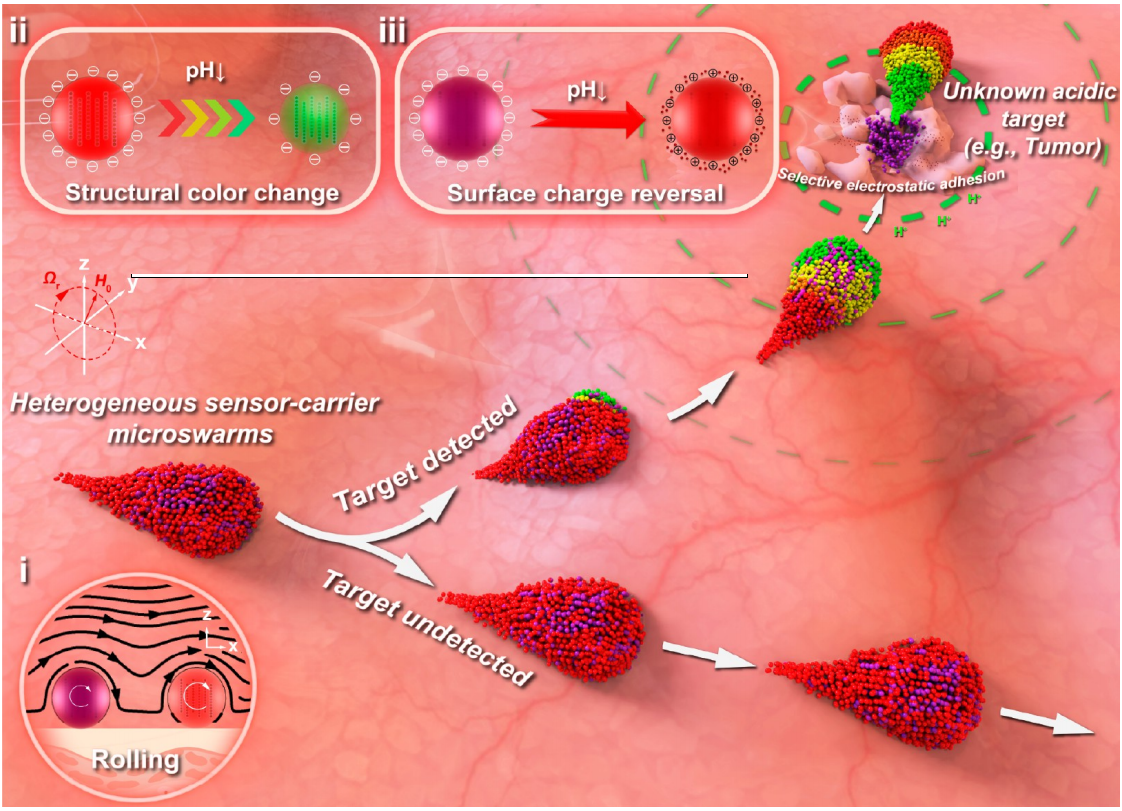
原文摘要如下:Micro/nanorobots hold the potential to revolutionize biomedicine by executing diverse tasks in hard-to-reach biological environments. Nevertheless, achieving precise drug delivery to unknown disease sites using swarming micro/nanorobots remains a significant challenge. Here we develop a heterogeneous swarm comprising sensing microrobots (sensor-bots) and drug-carrying microrobots (carrier-bots) with collaborative tasking capabilities for precise drug delivery toward unknown sites. Leveraging robust interspecific hydrodynamic interactions, the sensor-bots and carrier-bots spontaneously synchronize and self-organize into stable heterogeneous microswarms. Given that the sensor-bots can create real-time pH maps employing pH-responsive structural-color changes and the doxorubicin-loaded carrier-bots exhibit selective adhesion to acidic targets via pH-responsive charge reversal, the sensor-carrier microswarm, when exploring unknown environments, can detect and localize uncharted acidic targets, guide itself to cover the area, and finally deploy therapeutic carrier-bots precisely there. This versatile platform holds promise for treating diseases with localized acidosis and inspires future theranostic microsystems with expandability, task flexibility, and high efficiency.