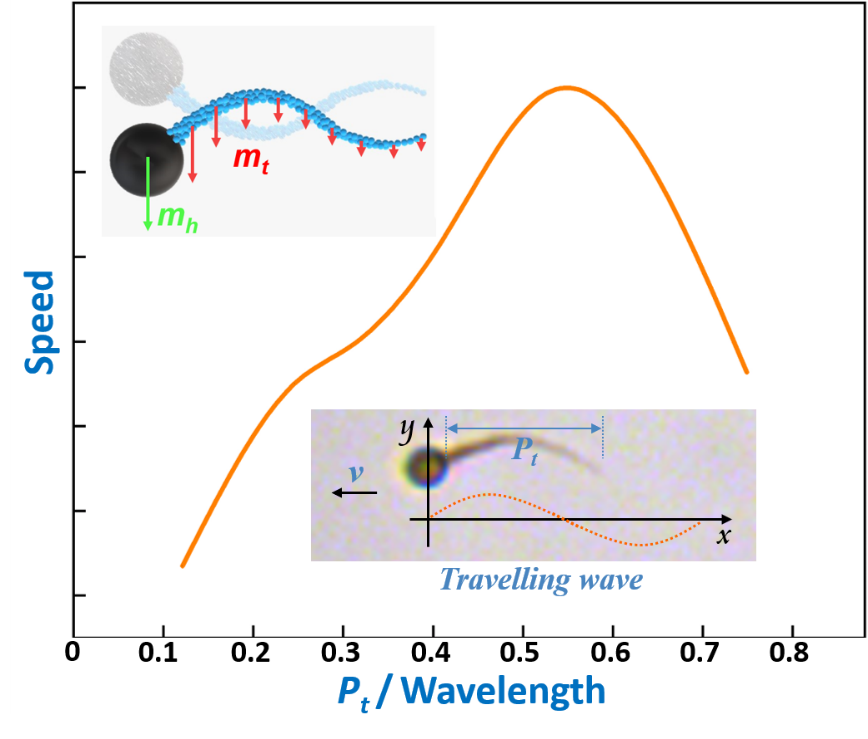
自然界中许多生物都能通过摆动/转动柔性纤毛或者尾部来产生运动,通过模仿这类生物的运动行为,已经报道了一些蝌蚪状的磁驱柔性微纳米机器人,但这些柔性机器人往往只有磁性的头部或尾部,且大多涉及到贵金属并需要复杂的多步骤制备。本文发展了一种头部和尾部都有磁性的蝌蚪状柔性微米机器人的磁场诱导-原位聚合方法,并研究了尾部长度/刚度对其运动行为的影响。通过调整制备过程中的磁场强度和持续时间,实现了柔性微米机器人尾部刚度和长度的调控。发现柔性微米机器人在振荡磁场下,弯曲尾部在径向上的投影约为行波的半波长时会表现出最大运动速度。此外,尾部刚度对运动速度也有决定性的影响。这项工作预期能够帮助磁驱柔性微米机器人的结构设计,并有望应用于智能传感微纳米机器人。
原文摘要如下:In analogy to eukaryotic cells that move by beating the flagella, magnetically-powered micro/nanorobots with flexible filament are capable of eluding the limitation of scallop theorem to generate net displacement in three-dimensional space, but they are limited by complicated fabrication and low speed. Here we demonstrate a tadpole-like flexible microswimmer with head and tail both magnetic by developing a magnetically-assisted in-situ polymerization method. The flexible microswimmer consists of a magnetic-bead head fixed to a nanochain bundle of magnetic nanoparticles (tail), and the tail length and stiffness can be adjusted simply by changing the duration and strength of the applied magnetic field during fabrication, respectively. For the microswimmer under an oscillating magnetic field, the magnetic head generates an undulatory motion which can be further increased by the flexible magnetic tail. The magnetically-induced undulation of head and tail generates a travelling wave propagating through its flexible tail, resulting in efficient tadpole-like propulsion of the microswimmer. The flexible microswimmer runs at a maximum motion speed when the tail length is ~5 times the diameter of the magnetic head, corresponding to approximately half the wavelength of the undulatory motion. The flexible microswimmers reported here are promising for active sensing and drug delivery as the tails can be designed with various responsive hydrogels, and the results are expected to advance flexible micro/nanorobots.